熟練者の精密作業を6軸力覚センサが再現!


新東工業株式会社 6軸力覚センサ ZYXerのご紹介
6軸力覚センサ ZYXer(ジクサー)
6軸力覚センサZYXer(ジクサー)は3軸(X,Y,Z)の荷重(F)と各軸周りのモーメント(M)を同時に検出するセンサです。ロボットに取り付けることで、人の手作業のような制御を実現します。
■ 業界最速レベルの通信速度 0.83msec.
■ 業界最高水準の高精度 分解能 1/4000(定格容量比)
■ 信頼性の高い検出データ 非直線性 ±2.0


熟練者の精密作業を力覚センサが再現
ZYXer 実装ロボットならリアルタイムの力検知により、位置を自動補正して確実に挿入可能です。
力覚センサが無いはめ合わせ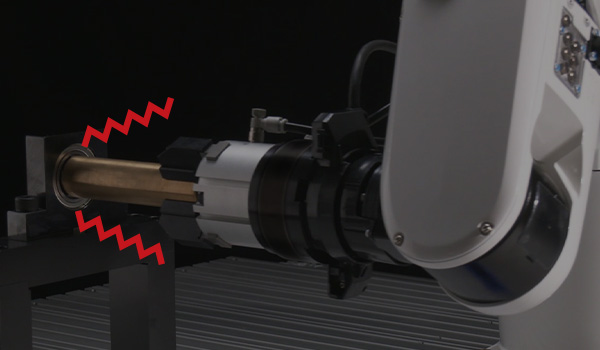 ロボットの繰り返し精度では公差以上の位置ズレで傷つき・稼働停止の可能性があります |
力覚センサを実装すると…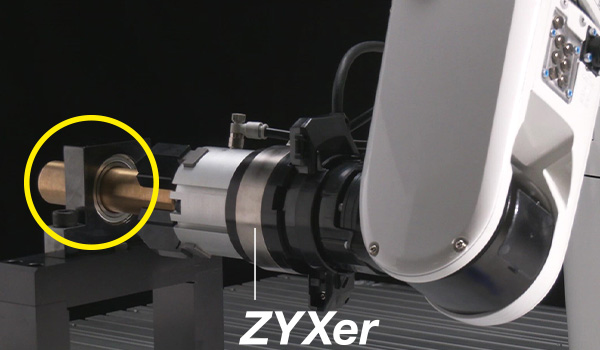 リアルタイムの力検知により、位置を自動補正して確実に挿入可能です |
力覚センサを搭載するメリット
省人化で人材不足を解消
熟練作業員の力加減を検出し、ロボットに教示できます。精度の高い加工作業をロボットで自動化可能です。
ロボットの高速移動に対応し、タクトタイム短縮
アームの高速移動に耐える定格モーメントを備えています。業界最速レベルの通信速度で、タイムラグ発生を抑制します。

高精度検知で不良を低減し、品質を向上
最小検出荷重が非常に小さいため、予期せぬ接触を検知でき、ハンドやワークの損傷を防ぐことができます。

6軸の検出荷重を記録し、トレーサビリティへ貢献
ロボットにかかる力を記録し、不具合発生時の状況・製造ロットを把握できます。不良発生時の原因追究や、改善に役立ちます。
ロボットだけでは困難な自動化も実現
ロボットに力の感覚を持たせ、製品や治具等との接触による反力に応じて、ロボットのアームをコントロール。
これまで自動化が困難であった不規則な表面への倣い作業でも、力覚センサZYXer を用いることで、ロボットによる自動化を実現します。
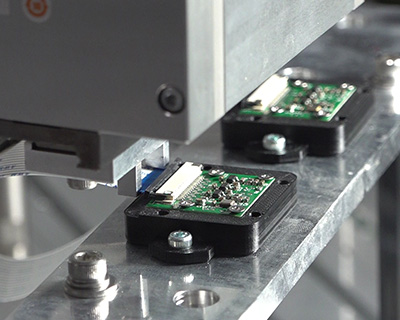
FPC挿入
|
|
薄く柔らかいFPC(フレキシブルプリント基盤)も、微細な力検知で確実に挿入。わずかな力変化を高速にフィードバックして自動化を制御します。 |
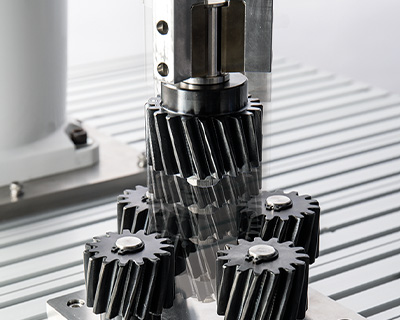
ギアの位相合わせ
|
|
高い分解能により、ギアにかかる小さな力データを検出。速やかに自動位置補正を行い、精度の高い位相合わせを実現。 |
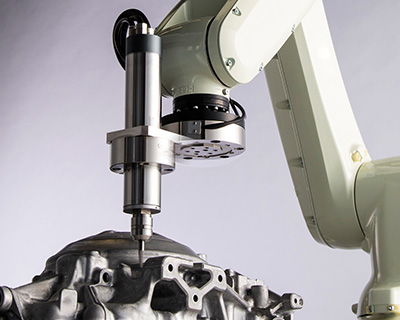
H7嵌合
|
|
素早い応答で位置を自動補正してH7/f7嵌合を実現。ロボットの位置制御だけでは発生してしまう±0.02mmのズレも補正します。 |
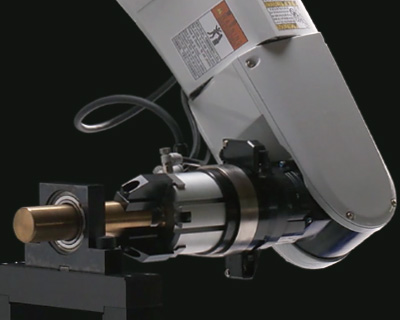
バリ取り
 |
荷重変化からバリ残りを検知して確実な仕上げを行います。 製品形状に倣いながら、バリによる荷重の変化を検知します。 |
シーリング
|
|
対象表面とノズルの距離を一定に保ち、表面形状に倣いながら追随することで、綺麗な仕上がりを実現します。 |

遠隔操作
|
|
作業者の力加減をロボットが再現すると共に、ロボットにかかる実荷重を作業者にフィードバックし、離れた作業者に感覚を再現します。 |
機器操作アシスト

|
操作者の力を検知して駆動を制御。重い機器を動かす場合も、移動をアシストし、負担を軽減します。 |
バフ研磨 |
ピッキング |
ねじ締め |
重量重心測定 |
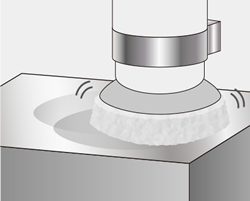 研磨表面の凹凸にも倣って、一定の力で研磨します。 |
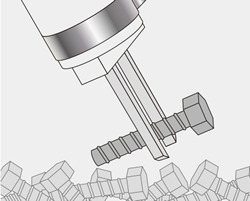 製品やハンドを傷つけることなくピッキングします。 |
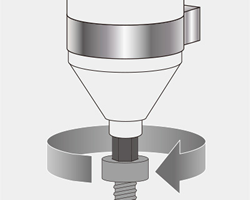 必要なトルクで正確なネジ締めを実施します。 |
 ロボットに把持したまま、重量と重心が測定可能です。 |


