

自動車・二輪車業界
食品業界
AI・ロボット・自動化
ロボットハンドチェンジャーによりロボットを汎用化!

2022国際ロボット展 ユアサネオテックSPインタビュー

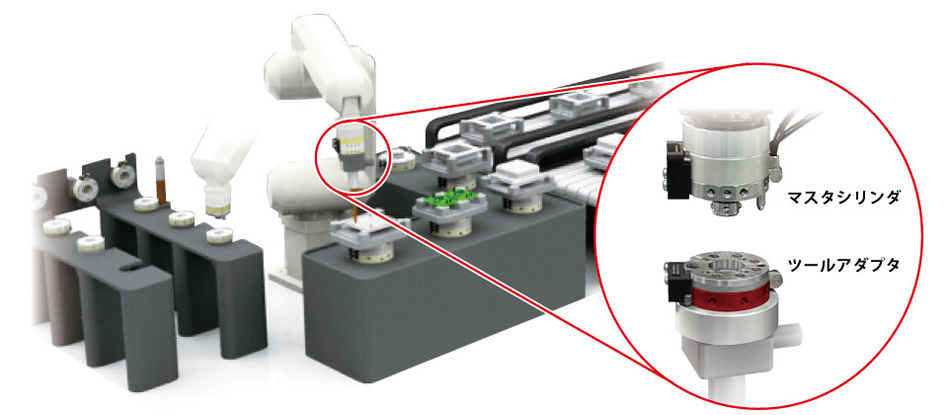
株式会社コスメック 「ロボットハンドチェンジャーのご紹介」
高精度・高剛性のロボットハンドチェンジャーでロボットを多機能化(汎用化)

ツール交換時間の短縮が可能となり、生産性UPにつながります。

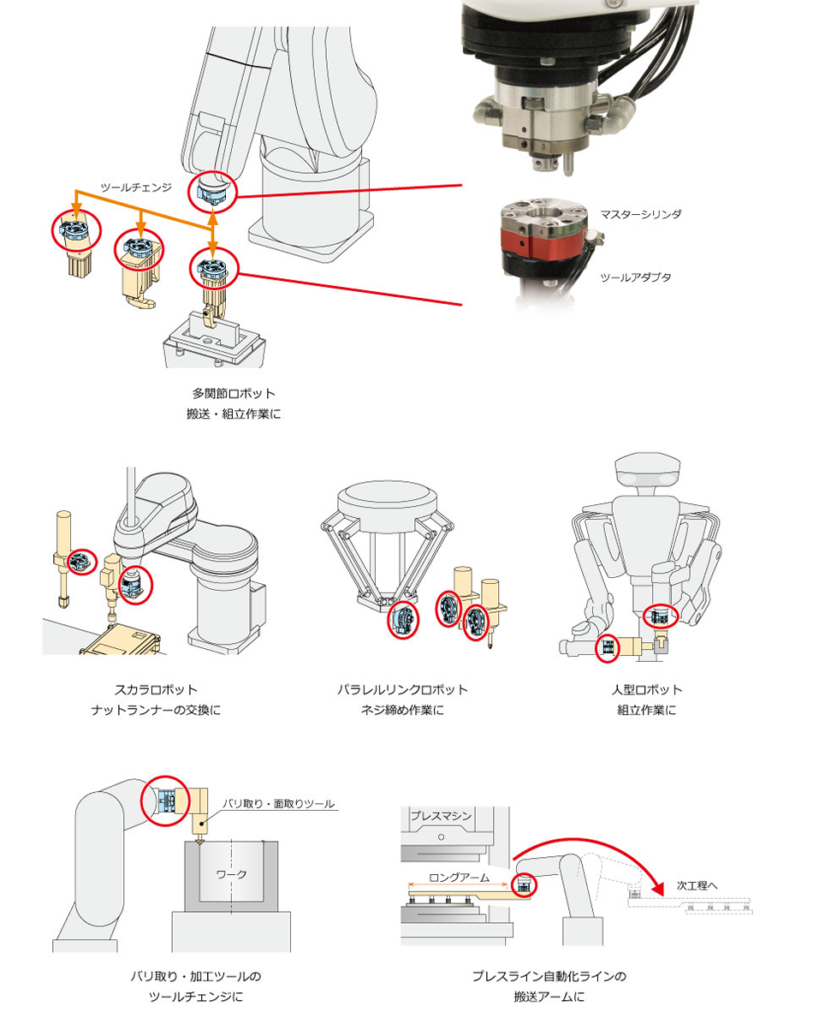
あらゆる作業を1台のロボットで完結

軽量・コンパクト
重量制限の厳しいロボットハンド部に最適。
軽くても可搬質量は大きい!
高寿命かつ高剛性
連結時はガタツキ ”ゼロ” で機械的な耐久性は200万回以上。
200万回使用後も位置再現精度3μm を維持します。
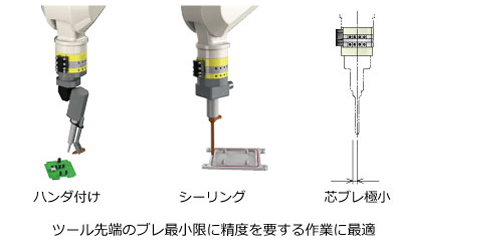
連結部のガタツキ ”ゼロ” で芯ブレやビビリを防止
可動式テーパースリーブによる二面拘束でスキマがなくガタツキがありません。
作業負荷による芯ブレやビビリを防止し、作業品質を向上します。

電極部の通信エラーによるチョコ停を防止
ロボットハンドチェンジャー本体のガタツキが ”ゼロ” のため、電極の振動が極小でノイズや摩耗を防止。
併せて、信頼性の高い電極で通信エラーによるチョコ停を防止します。
ツール落下を防止するセルフロック機能
停電等でエア圧力が ”ゼロ” になってもバネによるセルフロック機能でツール落下等を防止し、安全です。
※ 通常時はバネ力+エア圧力で連結を行ってください。
高精度な位置再現性
位置再現精度:3μm
可動式テーパースリーブによる二面拘束で高精度位置決めを実現しました。
リフト機能(払出し機能)で位置決め部を保護
分離時にピストンロッドによりツール側を突き放し、固着やカジリによるチョコ停を防止します。
ロングアームでもブレ極小
ガタツキがなく、位置再現精度が3μmのため、ロングアームのハンド等での位置ズレが極小になり、ワークのミスグリップや、搬送時のズレによる干渉を回避します。
豊富なオプションで様々なニーズに対応します。
先ずはお気軽にお問い合わせください。

